.png)


0
Yorum
LC29H(BS) GPS/RTK Raspberry Pi HAT
5.875,00
TL
+
KDV
7.050,00
TL
Gelince Haber Ver
5.875,00
TL
+
KDV
7.050,00
TL
Favoriye Ekle
Tavsiye EtYorum YapFiyat Alarmı
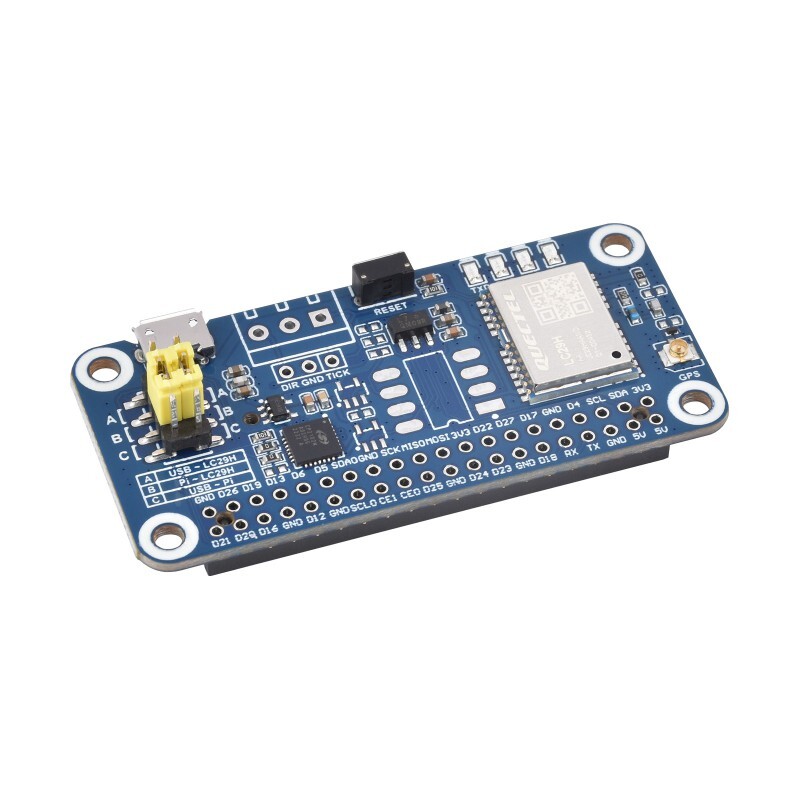
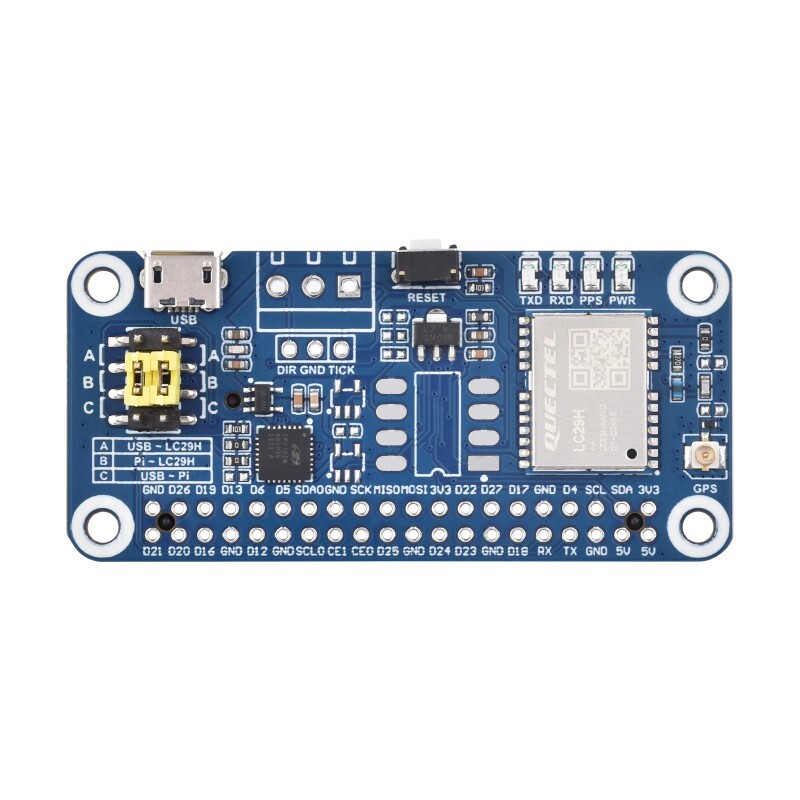
LC29H(BS) GPS/RTK Raspberry Pi HAT
LC29H(BS) GPS/RTK Raspberry Pi HAT, LC29H serisi, L1+L5 çift frekanslı ve çoklu GNSS sinyallerini izleyebilir, kentsel kanyonlardaki çoklu yol etkilerini azaltabilir ve düşük güç tüketimini korurken konumlandırma doğruluğunu iyileştirebilir. Yüksek hassasiyet ve güçlü anti-parazit yeteneği elde etmek için dahili LNA ve SAW filtresini kullanır. Santimetre düzeyinde yüksek hassasiyetli konumlandırma ihtiyacını karşılamak için çift bantlı konumlandırma ve RTK teknolojisini benimser. Gerçek zamanlı izleme sistemleri ve paylaşım ekonomisi uygulamaları için idealdir, akıllı tarım makineleri ve paylaşımlı iki tekerlekli araçlar gibi uygulamaların geliştirilmesine yardımcı olur.
Özellikler
- SKU: 25280
- Standart Raspberry Pi 40PIN GPIO uzantı başlığı, Raspberry Pi serisi kartları, Jetson
- Nano'yu destekler
- Kentsel kanyonlarda çoklu yol etkilerini azaltarak ve konumlandırma doğruluğunu artırarak L1+L5 çift bantlı uydu sinyallerinin eş zamanlı izlenmesini destekler
- Düşük güç tüketimini korurken çoklu GNSS sistemlerinin (GPS, BDS, GLONASS, Galileo ve QZSS) eş zamanlı alınmasını destekler
- LC29H(BS) GPS/RTK HAT:
GNSS ham gözlem ve düzeltme veri çıkışını destekler, RTK baz istasyonu kurmak için uygundur
- LC29H(BS) GPS/RTK HAT:
- Dahili düşük gürültülü amplifikatör ve akustik yüzey filtresi -165dBm
- Çok frekanslı aktif parazit gidermeyi destekler, dar bantlı sinyal (WiFi/2/3/4/5G) parazitini etkili bir şekilde bastırır veya ortadan kaldırır ve navigasyon doğruluğunu sağlar
- A-GNSS (Yardımcı GNSS) desteği, açıldığında soğuk başlatma ile ilk düzeltme süresini (TTFF) 5 saniyeye düşürür
- QGNSS yazılımını destekler, çeşitli modül işlevlerini ayarlamak kolaydır
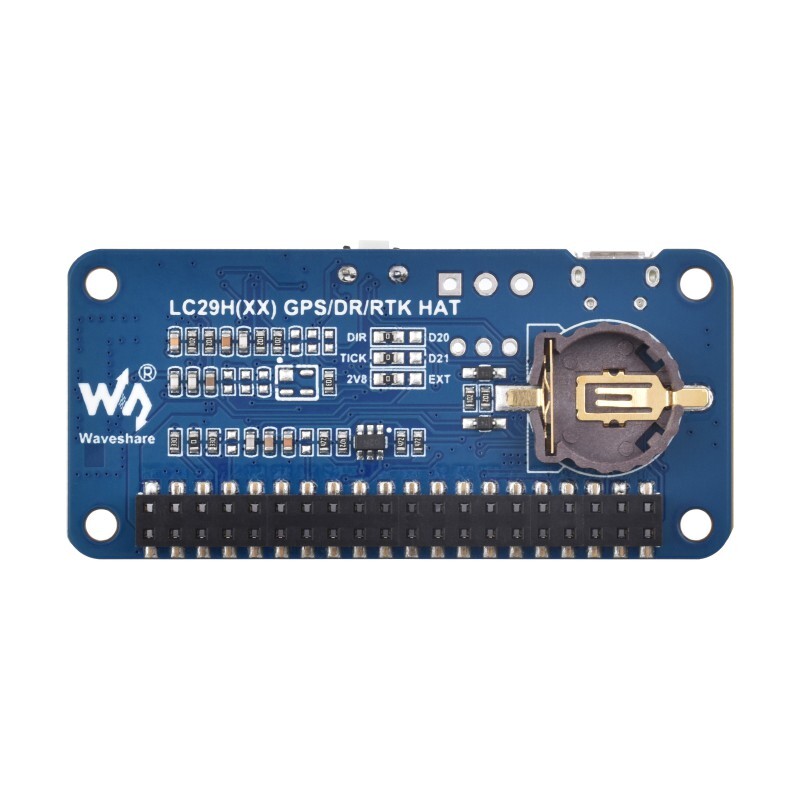
- Yerleşik pil tutucu, efemeris bilgilerini ve sıcak başlatmaları korumak için ML1220 şarj edilebilir hücreyi destekler
- Modül çalışma durumu için yerleşik 4 LED göstergesi
Paket İçeriği
- LC29H GPS HAT x1
- 2x20PIN dişi başlık x1
- GPS Harici Anten (D) x1
- IPEX 1 - SMA kablosu ~17cm x1
- Vida paketi x1
Teknik Özellikler
| Ürün | LC29H(AA) GPS | LC29H(DA) GPS/RTK | LC29H(BS) GPS/RTK | ZED-F9P GPS-RTK | |
|---|---|---|---|---|---|
| Frekans bandı | GPS/QZSS: L1C/A, L5 BDS: B1I, B2a Galileo: E1, E5a GLONASS: L1 | GPS/QZSS: L1C/A, L2C BDS: B1I, B2I Galileo: E1B/C, E5a GLONASS: L1OF, L2OF | |||
| EŞ ZAMANLI GNSS SAYISI | GPS/QZSS+BDS+Galileo+GLONASS | ||||
| SBAS (WAAS, EGNOS, MSAS, GAGAN) | destek | - | destek | ||
| RTK İşlevi | - | RTK Gezgini | RTK Taban | RTK Rover ve Taban | |
| Konumlandırma Doğruluğu | PVT | 1m CEP | - | 1,5m CEP | |
| RTK | - | 0,01m+1ppm CEP | - | 0,01m+1ppm CEP | |
| Navigasyon Güncelleme Oranı | PVT | 1~10Hz | - | 1~10Hz | |
| RTK | - | 1Hz | - | 1~8Hz | |
| RAW | 1Hz | 1~20Hz | |||
| RTK Yakınsama Süresi | - | <10sn | - | <10sn | |
| İlk düzeltme süresi (AGNSS Kapalı) | Soğuk başlatmalar | 26sn | - | 24sn | |
| Sıcak başlatmalar | 1sn | - | 2sn | ||
| Yardımlı başlatmalar | 16sn | - | 2sn | ||
| İlk düzeltme süresi (EASY on) | 2sn | - | |||
| İlk düzeltme süresi (AGNSS Açık) | Soğuk başlatmalar | 5sn | - | TBD | |
| Sıcak başlatmalar | 5sn | - | TBD | ||
| Yardımlı başlatmalar | 5sn | - | TBD | ||
| Hassasiyet | İzleme ve gezinme | -165dBm | -167dBm | ||
| Yeniden edinme | -159dBm | -157dBm | -159dBm | -160dBm | |
| Soğuk başlatmalar | -147dBm | -145dBm | -147dBm | -148dBm | |
| Hız doğruluğu | 0,2 m/sn | - | 0,05m/s | ||
| PPS doğruluğu | 20ns | - | 30ns | ||
| Dinamik performans | İvmelenme (Maks.): 4g | ||||
| Rakım (Maks.): 10000m | Rakım (Maks.): 50000m | ||||
| Hız (Maks.): 500m/s | |||||
| İletişim arayüzü | UART(9600~3000000bps, varsayılan olarak 115200bps), I2C(Maksimum 400KHz) | USB, UART(4800~921600bps, varsayılan olarak 9600bps), I2C(Maksimum 400KHz), SPI(5MHz) | |||
| Protokol | NMEA 0183 V4.10, RTCM 3.x | NMEA 0183 V4.10, UBX, RTCM 3.3 | |||
| Güç kaynağı | 5V | ||||
| Genel Akım | <40mA@5V (Devam modu) | ||||
| Çalışma sıcaklığı | -40~85℃ | ||||
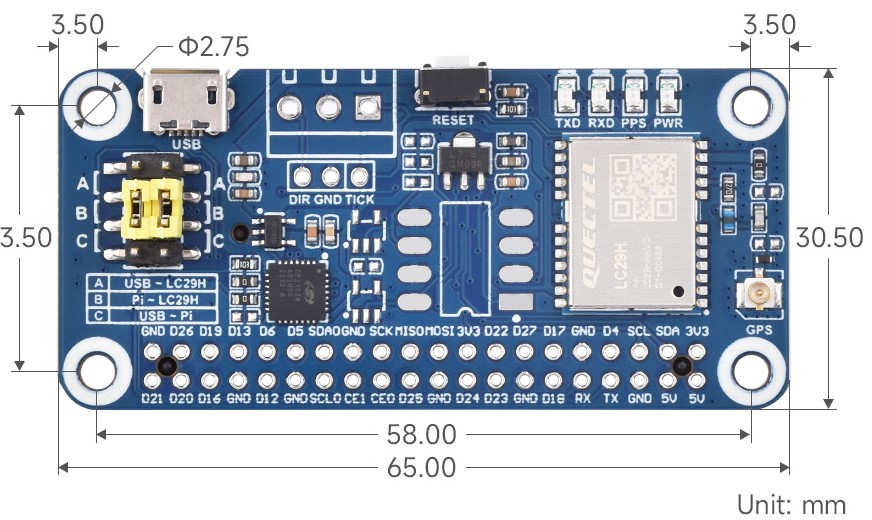
| Boyutlar | 65×30,5mm | ||||
BENZER ÜRÜNLER

141,00
TL
+
KDV
79,90
TL
+
KDV

188,00
TL
+
KDV
587,50
TL
+
KDV
Tükendi

2.444,00
TL
+
KDV

1.048,10
TL
+
KDV

5.875,00
TL
+
KDV

1.457,00
TL
+
KDV
5.875,00
TL
+
KDV

329,00
TL
+
KDV

1.457,00
TL
+
KDV

1.316,00
TL
+
KDV