.png)


0
Comment
WCMCU-103 Rotary Angle Sensor
92,00
TL
+
VAT
110,40
TL
Notify Me When It Arrives
92,00
TL
+
VAT
110,40
TL
Add to Favorite
RecommendCommentAlarm Price
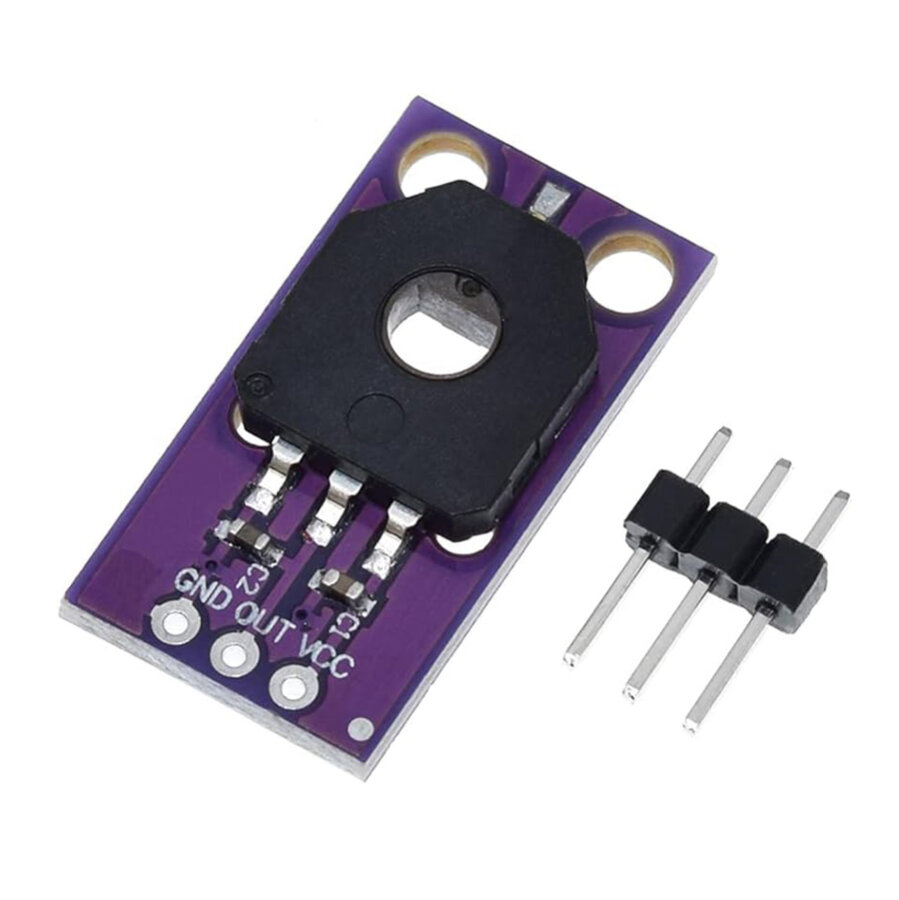
WCMCU-103 Rotary Angle Sensor
The WCMCU-103 Rotary Angle Sensor is a compact magnetic position sensor module designed for precise angle measurement and position detection. This sensor, which operates based on the Hall effect principle, provides long-lasting and reliable measurements without mechanical wear thanks to its contactless measurement capability.Features
- Supply Voltage: 3.3V - 5.0V DC
- Measurement Range: 0-360 degrees (full rotation)
- Output Type: Analog and digital (I²C)
- I²C Address: 0x36 (fixed)
- Analog Output Range: 0-5V
- Resolution: 12-bit (4096 steps)
- Accuracy: ±1.4° (typical)
- Response Time: <1ms
- Operating Temperature: -40°C to +125°C
- Interface: I²C, PWM, Analog
- PCB Dimensions: 22mm x 19mm
- Mounting Hole Diameter: 3mm
- Sampling Rate: Up to 10kHz
- Internal Filter: Programmable
- Magnet Requirement: Yes ( 8mm diameter cylindrical magnet, N35 or higher recommended)
- Magnet Detection Distance: 0.5mm - 3mm
- Low Power Consumption: ~6.5mA in active mode, ~1.5mA in sleep mode
- Pin Connections;
- VCC
- GND
- OUT
- DIR
- SDA
- SCL
Example Codes
Arduino Code for Angle Measurement with I²C
#include#define AS5600_ADDRESS 0x36 #define RAW_ANGLE_REG 0x0C void setup() { Wire.begin(); Serial.begin(9600); Serial.println("AS5600 Angle Sensor Test"); } void loop() { // Read angle value Wire.beginTransmission(AS5600_ADDRESS); Wire.write(RAW_ANGLE_REG); Wire.endTransmission(); Wire.requestFrom(AS5600_ADDRESS, 2); if (Wire.available() >= 2) { uint16_t rawAngle = (Wire.read() << 8) | Wire.read(); // Convert to 12-bit resolution (0-4095) rawAngle &= 0x0FFF; // Convert angle to degrees (0-360) float angleDegrees = rawAngle * 0.087890625; // 360 / 4096 // Print results Serial.print("Raw Value: "); Serial.print(rawAngle); Serial.print("Angle (degrees): "); Serial.println(angleDegrees); } delay(100); }
Arduino Code for Analog Reading
const int analogPin = A0; // Pin to which you connect the analog output
void setup() {
Serial.begin(9600);
Serial.println("AS5600 Analog Output Test");
}
void loop() {
// Read analog value
int rawValue = analogRead(analogPin);
// Convert 0-1023 to 0-360 degrees
float angleDegrees = map(rawValue, 0, 1023, 0, 360);
// Print results
Serial.print("Raw Value: ");
Serial.print(rawValue);
Serial.print("Angle (degrees): ");
Serial.println(angleDegrees);
delay(100);
}SIMILAR PRODUCTS

27,60
TL
+
VAT

46,00
TL
+
VAT

11,50
TL
+
VAT


27,60
TL
+
VAT

27,60
TL
+
VAT

27,60
TL
+
VAT

27,60
TL
+
VAT

368,00
TL
+
VAT

27,60
TL
+
VAT

27,60
TL
+
VAT

27,60
TL
+
VAT